
「自動運転車って結局どんな技術で動いているの?」――私自身、最初はそんな素朴な疑問からスタートしました。調べてみると、AI(人工知能)やセンサー、高精度地図、通信技術など、実に多くの技術が組み合わさっていることが分かりました。この記事では、自動運転車に使われている主要な技術を一つひとつ取り上げ、初心者の方にも分かるようにかみ砕いて解説します。読み終わるころには、自動運転車の全体像がしっかり見えてくるはずです。
そもそも自動運転車とは?レベル0〜5の違いを知っておこう

自動運転車の技術を理解するうえで、まず押さえておきたいのが「自動運転のレベル」です。私も最初はレベルの違いがピンと来なかったのですが、整理してみると非常にシンプルでした。
自動運転は、SAE(米国自動車技術者協会)という団体が定めた基準で、レベル0からレベル5まで6段階に分類されています。レベル0はすべてドライバーが操作する状態で、いわゆる「手動運転」です。レベル1は車線維持や自動ブレーキなど、一部の操作を車が補助してくれる段階。レベル2は複数の操作を同時に車が行ってくれる「部分的な自動運転」で、現在市販されている多くの先進運転支援システム(ADAS)がこれに該当します。
レベル3になると、特定の条件下では車がすべての運転操作を担い、ドライバーは監視義務から一時的に解放されます。ただし、車から要請があればすぐにハンドルを握れる状態でいなければなりません。レベル4は、限定されたエリアや条件内であれば完全にドライバー不要で走れる段階。そしてレベル5は、場所や条件を問わず完全に無人で走行できる、いわば「究極の自動運転」です。
2025年現在、一般向けにはレベル2〜3が実用化の中心で、レベル4は特定の地域での無人タクシーなどで実証・運用が進んでいます。私が技術を調べていて驚いたのは、レベルが上がるごとに求められる技術の種類と精度が飛躍的に増えていくことでした。ここからは、その具体的な技術を一つずつ見ていきましょう。
自動運転車を支える主要技術の全体像
自動運転車は、大まかに言うと「周囲を認識する技術」「自分の位置を把握する技術」「判断・計画する技術」「車を制御する技術」「外部と通信する技術」の5つの柱で成り立っています。人間が運転するときに「見る」「考える」「操作する」という一連の流れをすべて機械に置き換えているわけです。

周囲を認識するセンサー技術
LiDAR(ライダー):レーザーで周囲を3Dスキャンする目
LiDARは「Light Detection and Ranging」の略で、日本語では「光による検知と測距」と訳されます。簡単に言えば、レーザー光を四方八方に照射し、物体に当たって跳ね返ってくるまでの時間を測ることで、周囲の立体的な地図をリアルタイムに作り出すセンサーです。
私が初めてLiDARのデータ映像を見たときは衝撃でした。画面上に無数の点(点群データ)が表示され、建物や歩行者、他の車の形状が立体的に浮かび上がるのです。LiDARの最大の強みは、カメラと違い光の明暗に左右されにくいこと。夜間でも逆光でも、安定して距離を計測できます。ただし、雨や霧ではレーザーが散乱しやすく、性能が低下するという弱点もあります。また、高精度なLiDARはまだ高価で、コスト削減が業界全体の課題となっています。
カメラ:人間の目に最も近いセンサー
車載カメラは、自動運転車において「人間の目」の役割を果たすセンサーです。信号の色を識別したり、道路標識の文字を読み取ったり、白線の位置を検出したりと、色情報や形状情報を取得するのに優れています。
私が調べてみて面白かったのは、最近の自動運転車は単眼カメラだけでなく、ステレオカメラ(2つのカメラを並べて距離を測る方式)やサラウンドビューカメラ(車両の全周囲を映す複数カメラ)を組み合わせていることです。テスラのようにカメラを主軸にしたアプローチもあれば、LiDARと併用するアプローチもあり、メーカーごとに設計思想が異なるのも興味深いポイントでした。カメラは比較的安価ですが、逆光や暗所、悪天候では認識精度が落ちるため、他のセンサーとの補完が重要になります。
ミリ波レーダー:悪天候にも強い距離測定の名手
ミリ波レーダーは、電波(ミリ波帯の電磁波)を使って前方の物体との距離や相対速度を測定するセンサーです。すでに多くの市販車のACC(アダプティブ・クルーズ・コントロール、前の車との車間距離を自動で調整する機能)や衝突被害軽減ブレーキに使われているので、実は私たちの身近にある技術です。
ミリ波レーダーの大きな利点は、雨や霧、雪といった悪天候でも安定して検知できること。電波は光よりも波長が長いため、水滴や粉塵に邪魔されにくいのです。一方で、物体の形状を細かく識別するのは苦手です。たとえば「目の前にいるのが歩行者なのかポールなのか」を見分けるのはカメラやLiDARの方が得意です。そのため、ミリ波レーダーは他のセンサーと組み合わせて使うのが一般的です。
超音波センサー:近距離の番人
超音波センサーは、人間の耳には聞こえない高い周波数の音波を発し、その反射波で近くの物体を検知します。有効距離は数メートル程度と短いですが、駐車時や低速走行時に車の周囲にある障害物を検知するのに非常に役立ちます。市販車の「パーキングセンサー」としておなじみですね。コストが低く、悪天候にも比較的強いのがメリットですが、検知範囲が狭いため、高速走行中の遠方認識には向いていません。
センサーフュージョン:複数のセンサーを統合する考え方
ここまで紹介したLiDAR、カメラ、ミリ波レーダー、超音波センサーは、それぞれ得意・不得意があります。そこで重要になるのが「センサーフュージョン」という考え方です。これは、複数のセンサーから得られたデータを統合し、より正確で信頼性の高い認識結果を得る技術です。
たとえば、カメラが「人の形をしたものがいる」と判断し、LiDARが「50メートル先に物体がある」と距離情報を提供し、レーダーが「その物体は時速5kmで歩いている」と速度情報を加える。これらを合わせることで、「50メートル先に時速5kmで横断中の歩行者がいる」という高精度な情報に仕上がるわけです。私はこのセンサーフュージョンの仕組みを知ったとき、自動運転が「一つの万能センサー」ではなく「チームプレー」で成り立っていることを実感しました。
自己位置推定と高精度地図
GNSS(GPS)と高精度測位
自動運転車が安全に走るためには、「今、自分がどこにいるのか」を正確に把握する必要があります。そこで使われるのがGNSS(全球測位衛星システム)です。私たちがスマートフォンで使うGPSもGNSSの一種ですが、スマホのGPSは数メートル程度の誤差があり、車線レベルの正確さは期待できません。
自動運転車では、RTK(リアルタイムキネマティック)という補正技術を組み合わせることで、誤差をセンチメートル単位にまで縮める工夫がなされています。さらに、GNSSの信号が届きにくいトンネル内や高層ビル街では、後述するIMU(慣性計測装置)やオドメトリ(車輪の回転数から移動距離を推定する方法)と組み合わせて位置を推定します。
高精度3Dマップ(HDマップ)
自動運転車にとって欠かせないのが、高精度3Dマップ(HDマップ)です。これは一般的なカーナビ用の地図とはまったく別物で、車線の一本一本の幅や位置、路面の勾配、信号機やガードレールの正確な座標、速度制限といった膨大な情報がセンチメートル単位で収録されています。
私がHDマップの資料を見たとき、その情報量の膨大さに圧倒されました。自動運転車はこのHDマップとセンサーで取得したリアルタイムの周囲情報を照合することで、自分が地図上のどこにいるかを高い精度で特定します。これを「ローカリゼーション(自己位置推定)」と呼びます。ただし、HDマップは作成・維持に莫大なコストがかかるため、マップに依存しないアプローチ(カメラとAIだけで走行する方式)の研究も活発に進められています。
SLAM技術:地図を作りながら自分の位置も把握する
SLAM(Simultaneous Localization and Mapping)は、「自己位置推定と地図作成を同時に行う」技術です。あらかじめ完璧な地図がなくても、LiDARやカメラで取得したデータをもとに周囲の地図を構築しながら、その地図上での自分の位置も把握する、という非常に高度な処理です。ロボット工学の分野で発展した技術ですが、自動運転車でもHDマップが整備されていないエリアでの走行や、地図情報の更新に活用されています。
AIと判断・計画の技術
ディープラーニングによる物体認識
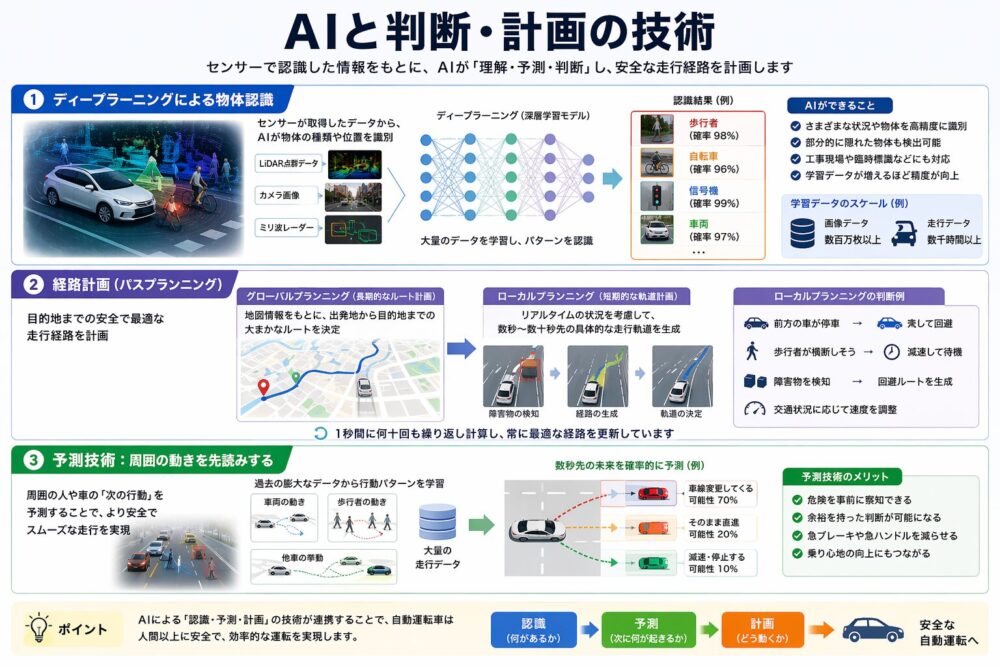
センサーが集めた膨大なデータから「これは歩行者」「これは信号」「これは自転車」と識別する作業を行うのが、AI(人工知能)、とりわけディープラーニング(深層学習)と呼ばれる技術です。ディープラーニングとは、人間の脳の神経回路を模した多層のニューラルネットワークを使い、大量のデータからパターンを学習する手法のことです。
私が特に興味を持ったのは、自動運転のAIが学習するデータ量のスケールです。何百万枚もの画像や何千時間分の走行データをAIに学習させることで、多種多様な状況に対応できるようになります。たとえば、部分的に隠れている歩行者を検知したり、工事現場の臨時標識を理解したりと、従来のプログラムでは対応が難しかった場面でも柔軟に判断できるのがAIの強みです。
経路計画(パスプランニング)
物体認識の次に重要なのが、「どの経路を通って目的地まで行くか」を決める経路計画の技術です。これは大きく2つの段階に分かれます。一つは、地図情報を使って出発地から目的地までの大まかなルートを決める「グローバルプランニング」。もう一つは、リアルタイムの交通状況や障害物を考慮して、数秒〜数十秒先の具体的な走行軌道を生成する「ローカルプランニング」です。
たとえば、前方に停車している車があれば車線変更して回避し、歩行者が横断しそうなら減速して待つ、といった判断がローカルプランニングに当たります。この処理は1秒間に何十回も繰り返されており、人間のドライバーが無意識に行っている判断を、アルゴリズムとして実装しているわけです。
予測技術:周囲の動きを先読みする
安全な自動運転には、「今この瞬間の状況」だけでなく、「次に何が起きるか」を予測する能力が不可欠です。たとえば、隣の車線の車がウインカーを出したら車線変更してくる可能性が高い、歩道にいる歩行者がこちらを向いたら横断するかもしれない、といった「行動予測」です。
最近では、過去の膨大な走行データから人間や他の車の行動パターンを学習し、数秒先の動きを確率的に予測するAIモデルが開発されています。この予測技術の精度が上がるほど、自動運転車はより安全でスムーズな運転が可能になります。
ここまで読んで、自動運転車の技術的な奥深さに興味が湧いてきた方も多いのではないでしょうか。私自身、調べれば調べるほど新しい発見があり、最新の技術動向を追うのが楽しくなりました。もっと体系的に学びたいという方には、専門家の解説がまとまった情報源を活用するのがおすすめです。
車両制御の技術
ドライブ・バイ・ワイヤ:電子制御で車を動かす
自動運転車が実際にハンドルを切ったりブレーキを踏んだりするには、AIの判断を物理的な動作に変換する仕組みが必要です。その基盤となるのが「ドライブ・バイ・ワイヤ」という技術です。従来の車では、ハンドルやペダルが機械的なケーブルや油圧系統で車輪やブレーキに直結していましたが、ドライブ・バイ・ワイヤではこれを電気信号に置き換えます。
つまり、AIが「右に30度ハンドルを切る」と指示を出すと、電気信号がステアリングモーターに送られ、物理的にハンドルが回る、という仕組みです。ステアリング、アクセル、ブレーキのすべてを電子制御化することで、AIからの指示を正確かつ迅速に実行できるようになります。私はこの仕組みを知ったとき、自動運転が「ソフトウェアだけの話」ではなく、車のハードウェア側にも根本的な進化が必要なのだと改めて理解しました。
冗長設計(リダンダンシー):万が一に備える二重三重の安全策
自動運転車において絶対に避けなければならないのは、システムの故障による事故です。そこで採用されているのが「冗長設計(リダンダンシー)」です。これは、重要なシステムを二重・三重に搭載し、一つが故障しても別のシステムが引き継いで安全に動作を続けられるようにする設計思想です。
たとえば、ブレーキシステムを2系統用意しておき、片方が故障しても、もう片方で確実に車を止められるようにする。コンピューターも複数台搭載し、メインが停止してもバックアップが瞬時に制御を引き継ぐ。ステアリングも同様です。この冗長設計は航空機の設計思想から取り入れられたもので、自動運転の安全性を根底から支える非常に重要な概念です。
学習をする際に体系的に知識を深めたい方は、書籍なども用いることをおすすめします。
通信技術:車と外部をつなぐインフラ
V2X通信:車がすべてとつながる
V2Xとは「Vehicle-to-Everything」の略で、車が周囲のあらゆるものと通信する技術の総称です。具体的には以下のような種類があります。
V2V(Vehicle-to-Vehicle)は車同士の通信です。たとえば、前方の車が急ブレーキをかけた情報を後続車にリアルタイムで伝えることで、追突事故を未然に防げます。V2I(Vehicle-to-Infrastructure)は車とインフラ(信号機や道路標識など)の通信です。信号機が「あと何秒で赤に変わる」という情報を車に送れば、より効率的な速度調整が可能になります。V2P(Vehicle-to-Pedestrian)は車と歩行者の通信で、歩行者のスマートフォンと連携して接近を警告する仕組みなどが研究されています。V2N(Vehicle-to-Network)はクラウドとの通信で、交通情報や地図のリアルタイム更新などに活用されます。
私が特に将来性を感じたのは、V2X通信によって「センサーでは見えない情報」を得られる点です。たとえば、建物の陰にいる車の存在や、数キロ先の渋滞情報など、物理的なセンサーでは取得不可能な情報を通信でカバーできるのです。
5G・次世代通信の役割
V2X通信を高い信頼性で実現するために期待されているのが、5G(第5世代移動通信システム)やその先の次世代通信技術です。5Gの特徴は「超高速」「超低遅延」「多数同時接続」の3つ。特に自動運転で重要なのは超低遅延で、理論上は1ミリ秒(1000分の1秒)程度の遅延でデータをやり取りできます。
車が時速100kmで走行している場合、1ミリ秒の間に進む距離は約2.8センチメートル。この低遅延があれば、遠隔からのリアルタイム制御も現実味を帯びてきます。実際に、遠隔地からオペレーターが自動運転車を監視・操作する「遠隔運転」の実証実験では5G通信が活用されています。
エッジコンピューティングと車載コンピューター
自動運転車が生成するデータ量は膨大です。LiDAR、カメラ、レーダーなどのセンサーが毎秒ギガバイト単位のデータを出力し、それをリアルタイムで処理しなければなりません。すべてのデータをクラウドに送って処理していたのでは遅延が生じるため、車両に搭載したコンピューターで即座に処理する「エッジコンピューティング」が不可欠です。
車載コンピューターには、AIの推論処理に特化したGPU(画像処理ユニット)や専用のSoC(システムオンチップ)が使われています。NVIDIAの「DRIVE」シリーズやMobileyeの「EyeQ」シリーズなど、自動運転向けの高性能チップが各社から開発されています。私はこの分野を調べてみて、自動運転車が「走るスーパーコンピューター」と呼ばれる理由に深く納得しました。消費電力や発熱との戦いも含め、車載コンピューターの進化は自動運転の実用化を左右する重要な要素です。
サイバーセキュリティ:走るコンピューターを守る
自動運転車が通信によって外部と接続されているということは、サイバー攻撃のリスクも抱えているということです。もし悪意のあるハッカーに車両の制御システムを乗っ取られたら、命に関わる大事故につながりかねません。
そのため、自動運転車では通信の暗号化、侵入検知システム(IDS)、セキュアブート(起動時にソフトウェアの改ざんを検知する仕組み)、OTA(Over-the-Air)アップデートのセキュリティ確保など、多層的な防御が施されています。国際的にも、UN-R155(国連の車両サイバーセキュリティ規制)という規格が策定され、自動車メーカーにセキュリティ管理体制の構築が義務付けられています。私がこの分野を調べて感じたのは、自動運転の安全性は「物理的な安全」と「デジタルの安全」の両方を同時に達成しなければならない、ということです。
シミュレーション技術:仮想空間でのテスト
自動運転車の開発において、実際の道路でテストするだけでは到底十分な検証はできません。安全性を統計的に証明するには、数十億キロメートルもの走行データが必要だと言われています。そこで活躍するのがシミュレーション技術です。
コンピューター上に仮想的な道路環境を構築し、さまざまな天候、交通状況、突発的なイベント(子どもの飛び出し、対向車の逆走など)をシミュレートすることで、実車テストの何千倍もの速度で検証を進められます。私がデモ映像を見たとき、仮想空間の街があまりにもリアルで驚きました。物理演算による車両の挙動再現や、レイトレーシングによる光の表現など、ゲームエンジンの技術が自動運転開発にも転用されています。このシミュレーションとAIの学習を組み合わせることで、開発効率と安全性の両方を高めているのです。
まとめ
自動運転車に使われている技術を一つひとつ調べてみて、私が最も強く感じたのは「自動運転は単一の技術ではなく、数多くの技術の集大成である」ということです。LiDAR、カメラ、レーダーといったセンサー群、それらを統合するセンサーフュージョン、高精度地図とGNSSによる自己位置推定、ディープラーニングによる物体認識と行動予測、経路計画アルゴリズム、ドライブ・バイ・ワイヤと冗長設計による車両制御、V2Xや5Gによる通信、エッジコンピューティング、サイバーセキュリティ、そしてシミュレーション技術。これらが一つでも欠ければ、安全な自動運転は実現しません。
逆に言えば、これらの技術が一つずつ進化するたびに、自動運転の実用化は着実に前進しています。現時点ではまだレベル4・5の完全自動運転が当たり前になるには時間がかかりますが、それぞれの技術分野で日々ブレイクスルーが生まれています。この記事をきっかけに、ニュースや新技術の発表を見るときに「ああ、これはセンサーフュージョンの話だな」「経路計画のアルゴリズムが改良されたのか」と理解できるようになっていただければ、とても嬉しいです。
自動運転技術はまだまだ進化の途上にあり、学べば学ぶほど新しい発見があります。体系的に知識を深めたい方は、書籍なども用いて学習することをおすすめします。


コメント